
upper image
Objectives
Development Infrastructure
- Software developement infrastructure
- HPC cloud infrasturcture for data management
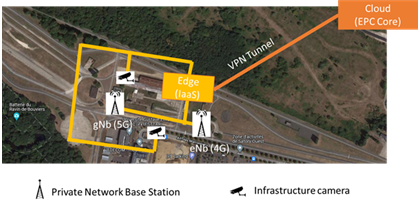
- XiL testing and validation

INT SW development infrastructure
IFAG/IFAT Laboratory

IDI simulator

VICOM simulator

VED Lab environment
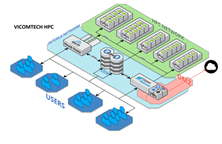
VICOM HPC
Demonstrator vehicles
- Access to fully equipped CCAM vehicles including the entrie software stack
- Access to E/E architectures including sensors and raw data
- Developement on vehicle level

Valeo Vehicle

Vicom Vehicle

IDI Vehicle
VED Vehicle
Testing Infrastructure
- Controlled scenario execution
- Diverse testing conditions (ODD) applicable

BCCAM testing infrastructure (ES)
VED proving ground (FR)

VALEO proving ground (DE)

IDI proving ground (ES)
Targets the design and development of a novel centralized, reliable and upgradable in-vehicle electronic control architecture (ECA).
Paradigm shift to a centralized, upgradable, HW/SW co-design driven ECA
Enables smart data flows and ensures safe and cyber-secure operation
Combines a SW-driven top-down approach with a HW-driven bottom-up approach
Creates the foundation for SdVs realizing a service-oriented architecture
Cooperates along the complete CCAM value chain Explores harmonization and standardization activities Pushes international cooperation and builds on results from previous projects

ADS Timeline
Methodology
Project Details
Duration in Months
Partners
Involved Countries
Budget in M
Use Cases
Impact Results